2019. 3. 30. 01:53ㆍ컴퓨터/컴퓨터 활용
GR-18 + 3xG + 3A Vario 수신기는 fc를 겸하여 작동하기 때문에 따로 fc를 구입하지 않아도 되지만 가격이 그만큼 더나갑니다. 수신기를 그라프너 송신기와 처음 세팅할 때 변속기, 모터 , 배터리등 기체마다 다르기 때문에 각각 설정세팅 내용이 다르게 됩니다.
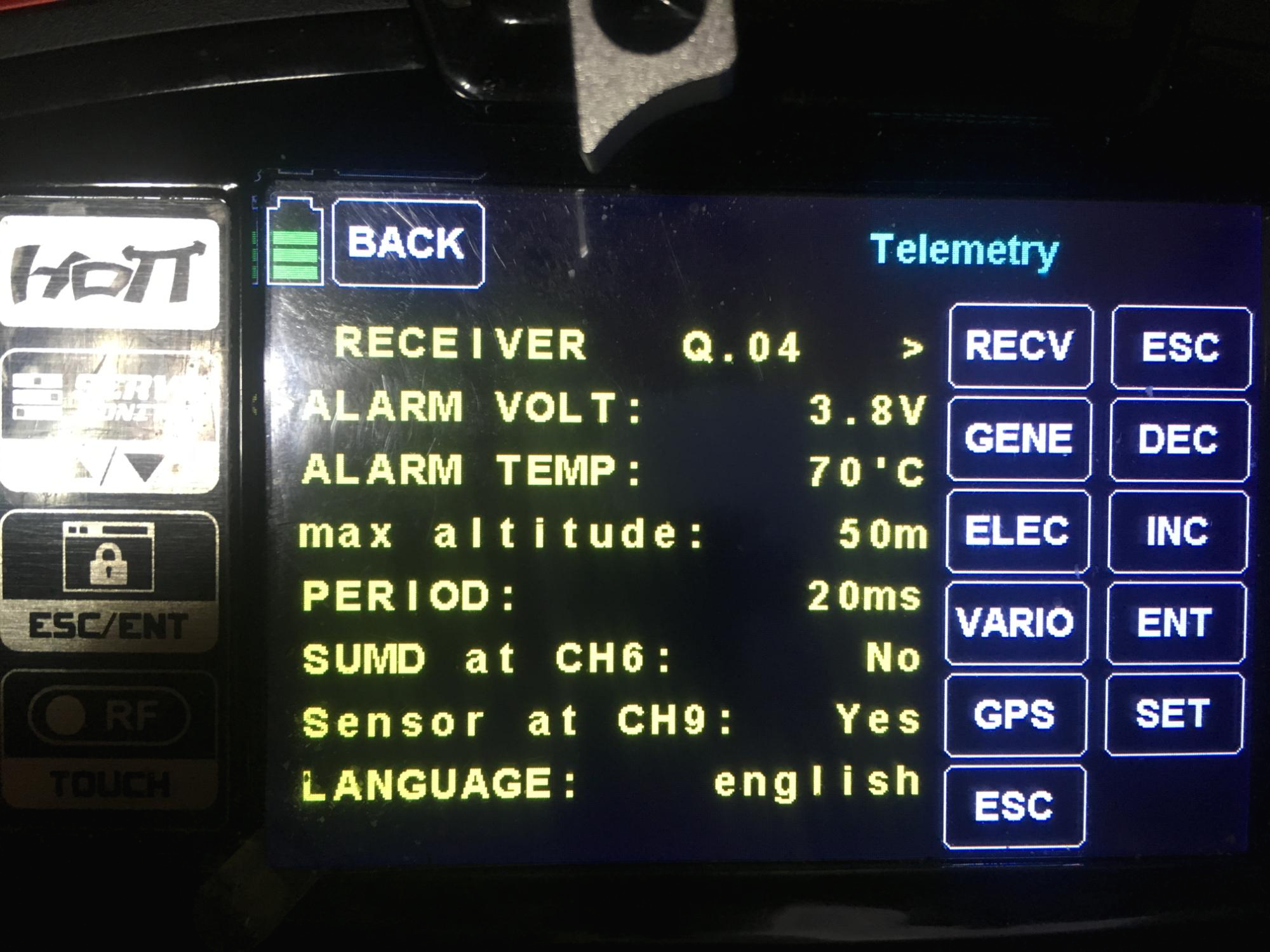
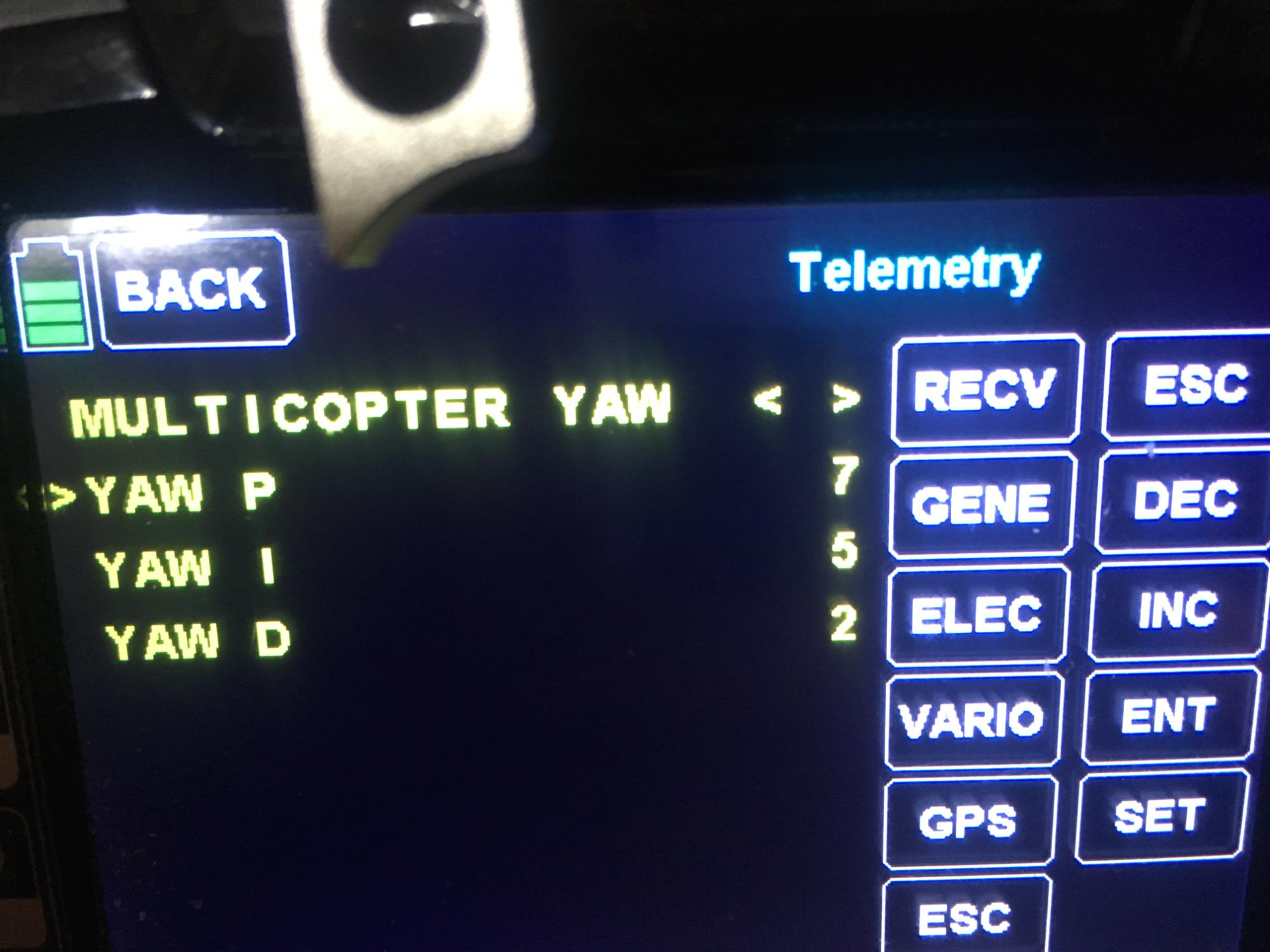
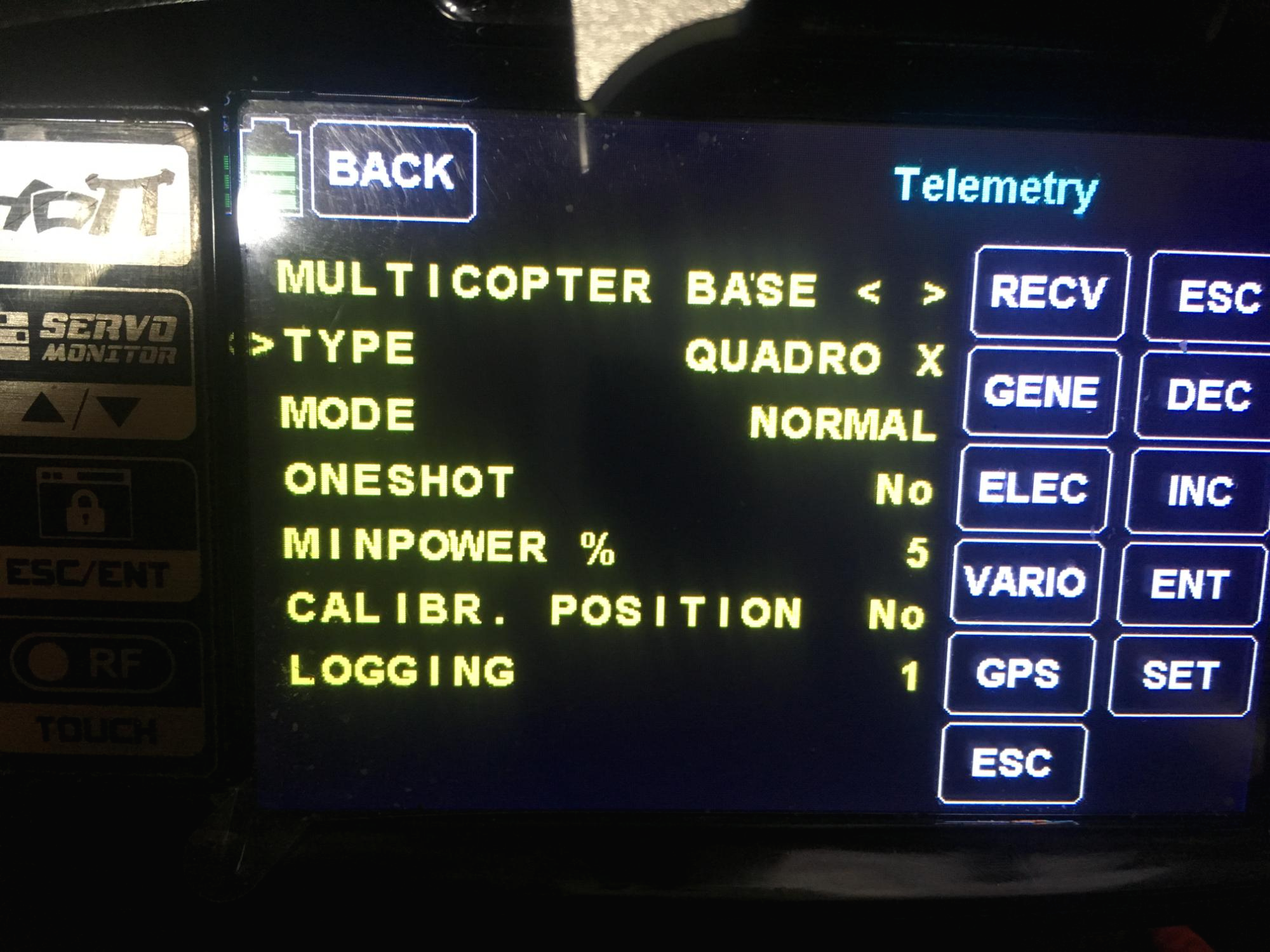
여기에 올려 놓은 캡쳐 사진들은 GR-18 + 3xG + 3A Vario 수신기와 송신기가 연결된 상태에서 탤리미트리를 연결하여 자이로등 세팅값을 설정하여 놓은 캡쳐화면으로 기체마다 다르므로 세팅 할때 어떤 변화가 있는지 알아보고자 올려놓은 자료입니다.
GR-18 + 3xG + 3A Vario 수신기는 fc를 겸하여 작동하며 세팅 할때 컴퓨터와 연결하지 않고 조종기에서 세팅을 하므로 현장에서 세팅값을 알면 바로 쉽게 드론을 날릴수 있습니다. 그 때 필요한 자료가 될 것 같아 참고자료를 다운 로드 받은 파일에서 주요한 기능에 대하여 알아보기 위해 올려 놓았습니다.



참고자료출처 : 그라프너 수신기 메뉴얼에서 발취
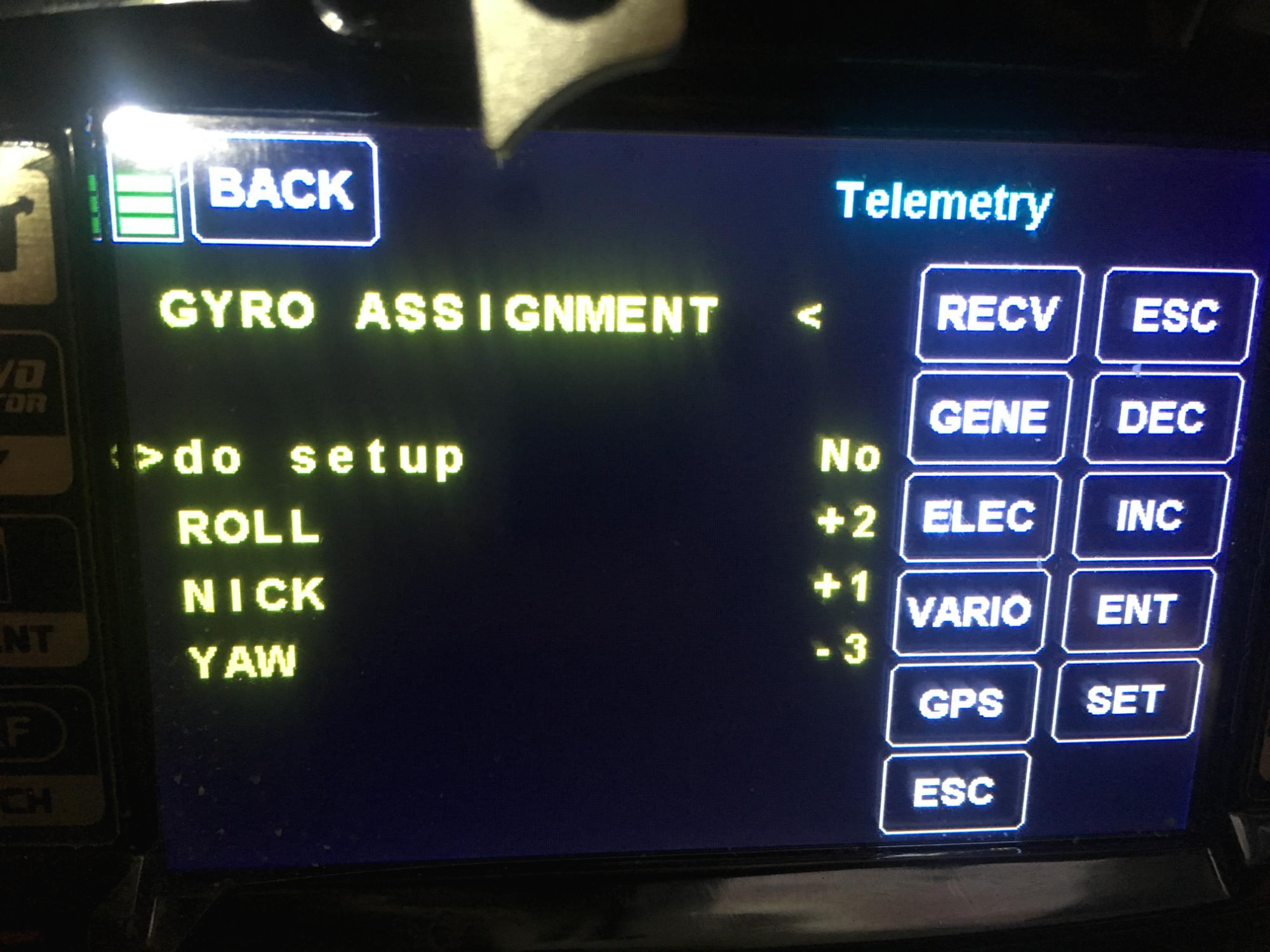
자이로 축 방향 설정: 자이로 동작방향 설정
수신기의 Axis assignment 메뉴 화면에서 > 커서를 Setup항목으로
이동하여 No를 Yes로 설정한 다음 아래 설명된 방법으로 3축 자이로
센서의 축 방향을 설정합니다.
조종기의 에일러론 스틱을 완전히 오른쪽으로 이동하면 ROLL의 +0
항목에 커서가 표시되고 콥터를 롤 방향 오른쪽으로 45도 이상 기울
이면 동시에 ROLL +0항목 값이 롤의 축 방향의 값으로 설정됨과 동
시에 커서가 해제되고 에이러론 축 방향은 설정 완료됩니다.
적어도 한 기능을 설정하여 항상 로깅 하시기를 추천합니다.
로깅기능은 그라프너 조종기의 타이머 1스위치와 연결되어 동작하여
SD카드에 저장됩니다.
Axis 할당
Roll 과Nick의 옵션셋팅 ROLL/NICK P: 호버링 상태에서 떨림 증상이 나타날 때까지 ROLL/
NICK P게인 값을 5씩 높게 설정합니다. 그런 다음, 풀 스로틀로 비행할
때 나타날 수 있는 떨림을 방지하기 위해 다시 P 게인의 값을 3~5정도
다시 내립니다. 풀 스로틀에서 비행할 때 떨림 현상이 발생하면 ROLL/
NICK P게인 값을 더 내려서 설정하시기 바랍니다.
ROLL/NICK D: 콥터의 에일러론과 엘리베이터의 정확한 동작을 위해
D게인 값을 설정합니다. 값을 5씩 올려가며 D게인 값을 잘 조절합니다.
너무 높은 D 게인 값은 아주 빠른 떨림이 발생됩니다. 떨림 증상이 나타
나면 떨림 증상이 없어질 때까지 D게인 값을 낮게 설정합니다.
이제 에일러론과 동일한 방법으로 엘리베이터 축 방향을 설정합니다.
조종기의 엘리베이터 스틱을 완전히 다운으로 이동하면 NICK(엘리베
이터)의 +0항목에 커서가 표시되고 콥터의 머리를 다운방향으로 45
도 이상 다운 방향으로 기울이면 동시에 NICK(엘리베이터) +0 항목
값이 엘리베이터 축 방향의 값으로 설정됨과 동시에 커서가 해제되고
엘리베이터 축 방향 설정이 완료됩니다.
마지막으로 YAW(러더)축 방향을 설정합니다. 조종기의 러더 스틱을
완전히 오른쪽으로 이동하면 YAW(러더)의 +0항목에 커서가 표시되
고 콥터의 머리를 오른쪽으로 45도 이상 오른쪽으로 돌리면 동시에
YAW +0항목 값이 YAW(러더)축 방향의 값으로 설정됨과 동시에 커
서가 해제되고 러더 축 방향은 설정이 완료됩니다
이제 3축 자이로 센서의 3축의 동작 방향의 설정은 완료 되었습니다.
3축 동작방향의 설정을 마친 후에 콥터를 비행하기 전에 동작방향이
정확하게 동작하는지 꼭 확인 하시기 바랍니다.
3축 자이로 센서의 축 방향의 설정의 확인을 위해서 콥터의 프로펠
러를 제거하고 스로틀을 1/4 정도 위로 이동하면 모터가 동일한 속도
로 회전하게 됩니다.
Attitude모드 상태에서 콥터의 머리를 아래로 기울이면 앞쪽 모터들
은 뒤쪽의 모터보다 더 빨리 회전해야 합니다. Attitude모드에서 콥터
를 롤 축의 오른쪽으로 기울이면 왼쪽 모터보다 오른쪽 모터가 더 빨
리 회전해야 정상 동작상태 입니다.
R/N RATE I: Rate(3D)모드의 I값을 설정합니다. 너무 낮은 값으로 설
정하면 콥터가 천천히 동작합니다. 만약 Roll(에일러 론)혹은 Pitch(엘리
베이터) 동작 후에 진동이 발생한 후에 멈추면, 반드시 ROLL/NICK I값을
진동이 없을 때까지 줄여 주시기 바랍니다.
RATE: Rate(3D)모드에서 회전의 최대 각도를 설정하는 기능입니다.
DAMPING: DAMPING은 가능한 한 낮게 설정해야 하지만, 필요 시
PID제어가 최적으로 작동하고 콥터의 설정을 가장 좋게 하기 위해서는
DAMPING기능을 높게 설정할 수도 있습니다. 만약 PID설정으로 진동이
발생하지 않는다면, 댐핑 설정의 값을 설정하고, 댐핑기능의 설정이 더
좋게 혹은 나쁘게 작동하는지 확인 하시기 바랍니다. 추천되는 댐핑기능
의 설정 값은 아래와 같습니다.
One shot변속기와 5~6인치 프로펠러가 장착된 레이스콥터: 1-2
One shot 변속기와 8인치 프로펠러가 장착된 콥터: 2
더 큰 프로펠러가 장착된 콥터: 2 혹은 그 이상
ROLL FACTOR %: 전체 Gain의 퍼센트 값으로 Roll셋팅을 설정하세
요. 대칭적인 콥터에는 값을 100으로 설정하시면 됩니다. 만약 콥터의 무
게중심 때문에 콥터가 엘리베이터 축보다 에일러론 축이 더 예민하다면,
여기에서 Roll(에일러론)값을 변경하실 수 있습니다. 그라프너 ALPHA
RACE 250Q에 설정된 ROLL FACTOR% 값은 약 65%입니다.
POWER2SENS: 고려사항: 아주 빠른 비행은 풀 스로틀에서 콥터에
진동을 발생할 수 있습니다. 이 기능의 설정 값은 소비자가 자이로 감도
를 억제하도록 설정할 수 있게 합니다. 값이 높을수록 풀 스로틀에서 증
가된 자이로의 감도를 억제를 하여 진동을 방지 합니다.
ROLL/NICK I: Attitude 모드의 I값을 설정합니다. 너무 낮은 값으로 설
정하면 콥터가 천천히 동작합니다. 만약 Roll(에일러 론)혹은 Pitch(엘리
베이터) 동작 후에 진동이 발생한 후에 멈추면, 반드시 ROLL/NICK I값을
진동이 없을 때까지 줄여 주시기 바랍니다.
AGILITY: Agility 기능은 비행속도의 변화에 따른 러더의 움직임을 방지
하는 기능입니다.
'컴퓨터 > 컴퓨터 활용' 카테고리의 다른 글
| 크롬확장프로그램 LLY유튜브에 설정하여 영어기초배우기 (0) | 2020.08.07 |
|---|---|
| 크롬 브라우저에서 화면의 글꼴 크기 설정하는 방법 (0) | 2020.07.01 |
| 디스플레이 복제와 확장방법 windows 10에서 설정하기 (0) | 2020.03.02 |
| 네이버 지도 지적 편집도에서 지적공부상 도로확인하는 방법 (0) | 2020.02.15 |
| 컴퓨터 메인보드 cmos 배터리 교환 cr 2032 리튬이온버튼셀 (0) | 2019.03.05 |
| 컴퓨터 전원옵션 설정에서 에너지 절전모드 활용 원도우 10을 기준 (0) | 2019.02.28 |
| windows10 보안프로그램 설치 컴퓨터 부팅이 안될때 실행한 방법 (0) | 2019.02.28 |
| 스마트폰카메라 개수 증가 할것을 예상했던 글 (0) | 2019.01.15 |